fig : DC-DC boost converter test setup to find the converter characteristic
at different operating regions (2021 December)
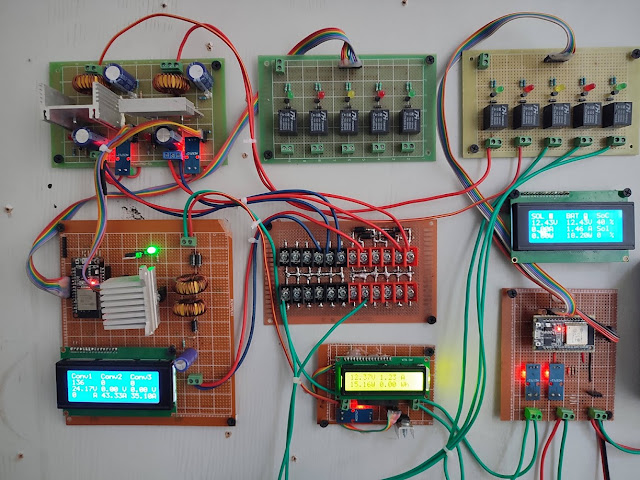
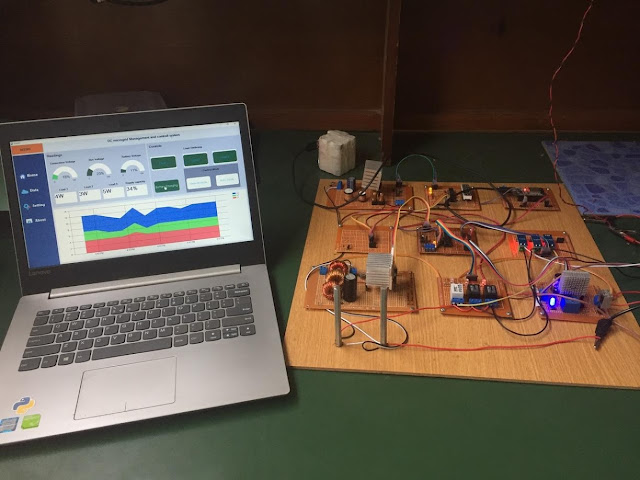
fig : Initial microgrid setup (2021 November)
fig : Lora based energy meter (2021 October)
fig : Energy meter firmware development and testing (2021 September)
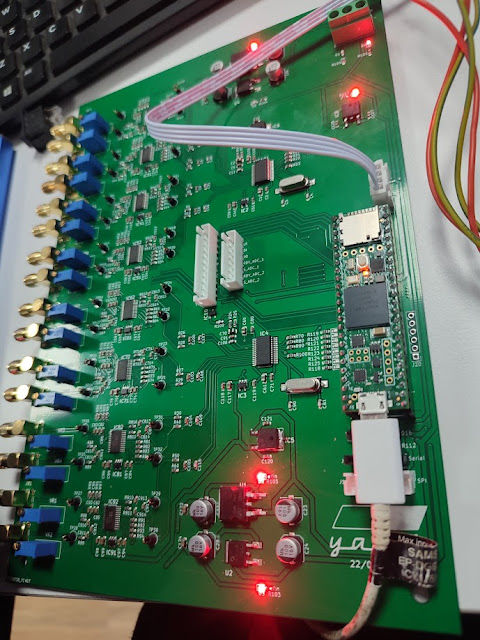
fig : energy meter developed in Kathmandu university
microgrid lab (2021 September)
fig :Programmable relay board developed at Kathmandu university
microgrid lab (2021 September)
fig : Energy meter PCB board (2021 September)
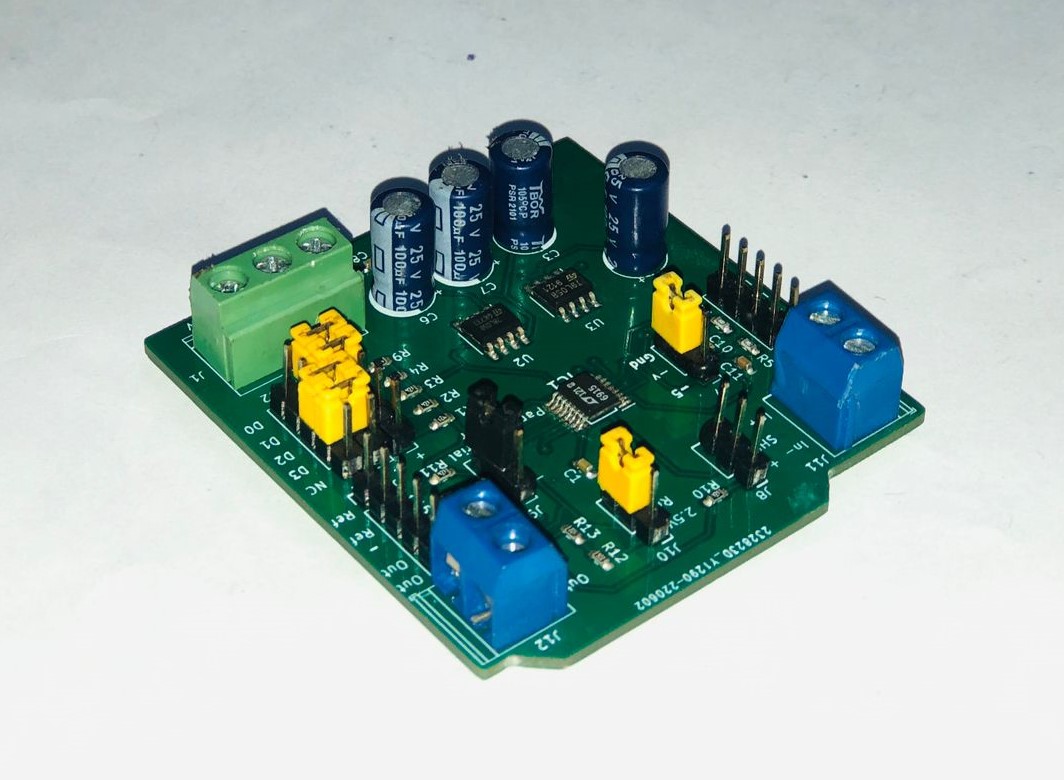
fig : MPPT charge controller PCB board (2021 September)
fig :Programmable relay board (2021 September)
fig : MPPT charge controller test (2021 September)
fig : Lora based Energy meter network test site at Gorkha district (2021 August)
fig : Lora mesh network test site at Kathmandu University premises (2021 July)
fig : LoRa Mesh network test node
fig : LoRa mesh simulation on NS2 software (2021 July)
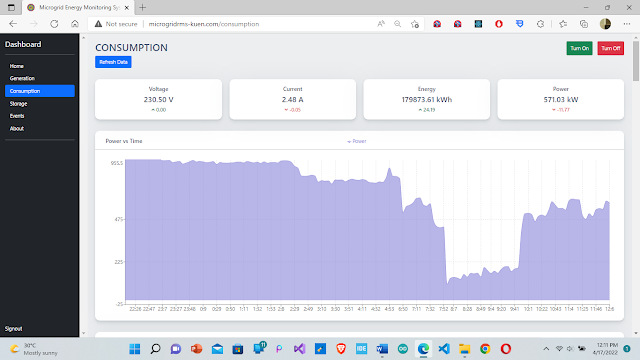
fig : energy monitoring website developed for Marangburu microgrid
located at Biratnagar Nepal (2021 july)
fig : LoRa mesh software development (2021 June)
fig : DC- DC bidirectional Buck-Boost converter testing (2021 June)
fig : LoRa energy meter preliminary hardware test (2021 June)
fig : SPWM inverter hardware setup (2021 May)
fig : Wifi based energy meter test (2021 May)
fig : Experiment to measure phase angle between current and voltage
I was easily able to detect phase angle and was trying to find a
way to determine whether the measured angle is lead or lag via code. (2021 March)
fig : SPWM pulses generated for inverter (2021 March)
fig : MPPT solar charge controller experimental setup
fig : A4 size CNC plotter (2021 February)
fig : CNC plotter result (2021 February)
fig : CNC plotter result (2021 February)
fig : CNC plotter result (2021 February)
fig : CNC plotter result (2021 February)
fig : DVD driver CNC plotter 2021 (January)
fig : DVD driver CNC plotter (2021 January)
fig : work table (2021 January)
fig :Motor control lab KU DOEEE (2020 November)
fig: Priority based load sharing simulation of DC-DC converters
(2021 October)
fig : project framework development MS by research (2020 march )
Bachelors in Electrical and Electronics Engineering Graduation
fig : Internship SCADA design for Upper Mai Hydropower ( 2019 October)
fig : Internship HMI design (2019 October)
fig : Internship HMI design (2019 October)
fig : Bottle filling plant PLC setup (Internship 2019 October)
fig : Internship PLC programming setup (2019 October)
fig : Microcontroller training program (2019 August)
fig : fourth year project setup (2019 August)
fig : fourth year project setup (2019 August)
fig : Rural Nepal household load profile survey (2019 4th year)
fig : Light intensity controller software ( 2019 4th year)
fig : Relay switching board ( 2019 4th year)
fig : 8 channel nrf24 based wireless receiver ( 2019 4th year)
fig :Nrf24 based remote controller ( 2019 4th year)
fig : esp32 SD card data logger ( 2019 4th year)
fig : ATmega328 based boost converter controller
( 2019 4th year)
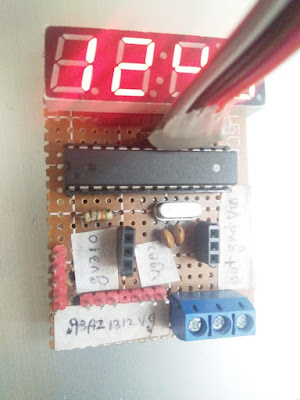
fig : LM35 based seven segment temperature
measurement circuit ( 2019 4th year)
fig : IOT based contactor controller
(2019 4th year)
fig : Energy meter (2019 4th year)
fig : microcontroller training program (2018 3rd year)
fig : Patient monitoring system for hospitals
(3rd year project 2018)
fig : Patient monitoring system for hospitals
(3rd year project 2018)
fig : Optical pulse sensor serial plot
(3rd year 2018)
fig : IOT based waste management system
(3rd year 2018)
(IT meet Hardware hackathon)
fig : ATmega328 based clock (3rd year 2018)
fig : Power supply design for electronics projects
(3rd year 2018)
Fig : IOT based home automation board
(3rd year 2018)
fig : Bottle hackathon 2018
(3rd year 2018)
fig : Line following robot sensor array development
(2nd year 2017)
fig : Line follower combinational logic PCB
(2nd year 2017)
fig : Line follower robot logic development
(2nd year 2017)
fig : ATmega328 development board PCB
(2nd year 2017)
(2nd year 2017)
fig : IR sensor array PCB
(2nd year 2017)
fig : combination logic based line follower
robot with 1 bit memory PCB
(2nd year 2017)
fig : project day (2nd year 2017)
(combinational logic based line follower with 1 bit memory)
(2nd year 2017)
fig : Environmental data collection device
Barometric pressure, temperature , ultrasonic distance measurement
CO2 level measurement
(2nd year 2017)
fig : first year Arduino training ( 1st year 2016)